Spirob
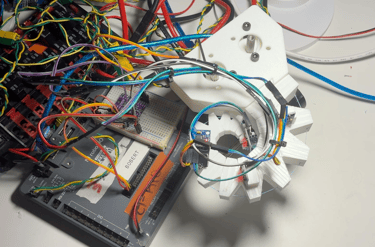
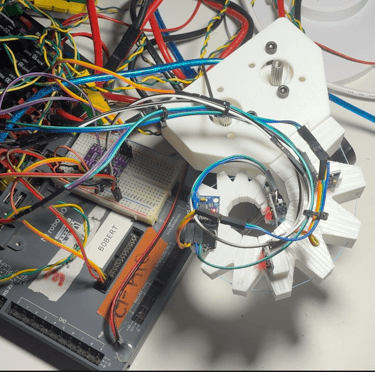
Created a simulated and physical soft robotic tentacle capable of lifelike grasping in MuJoCo, with ongoing work toward transferring learned policies to real hardware via IMU feedback.



Hackthon projects


PillPal


CanvAI


Kittenbot
Created a simulated and physical soft robotic tentacle capable of lifelike grasping in MuJoCo, with ongoing work toward transferring learned policies to real hardware via IMU feedback.
Created a simulated and physical soft robotic tentacle capable of lifelike grasping in MuJoCo
Created a simulated and physical soft robotic tentacle capable of lifelike grasping in MuJoCo, with ongoing work toward transferring learned policies to real hardware via IMU feedback.
Data science
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incidid






App Usage prediction
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incidid


Song Popularity analysis
Classmate Survey
Movie Clustering
Income & Air Quality


Copper Future prediction